什么是电机标定?电机标定的作业原理
来源:安博电竞网上官网 发布时间:2023-08-13 22:21:46标定大抵上分红两类,一类是功率标定,一类是外特性标定。前者方针是以提升在各工况下的体系功率。假定你了解交直轴改换,那么功率标定的方针,便是经过调整交直轴,在不同的转速条件下,以更高的功率来完成扭矩。这个进程便是不断调整你的交直轴电流(关于异步机还得调整转差率);
后者外特性标定,离不开温升束缚。这个表明在不同的工况下,电机的温升速度,这个能够用于更高档的温度监控等运用条件。关于整车运用的含义更为严重。
不同的电机,本身的一些本体参数不同,额外电压,额外扭矩,额外转速等等也不同,假如你不进行标定,或许电机和操控器也能运转起来,但必定达不到你想要的要求。
想要整个电驱体系运转在最佳状况(进步功率,进步操控精度),就要经过台架进行标定。
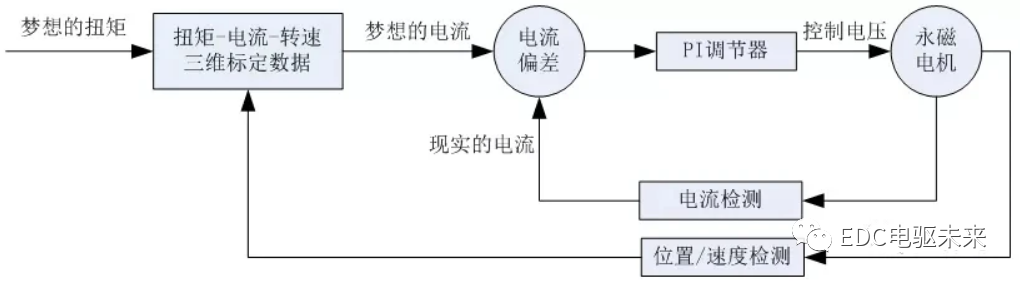
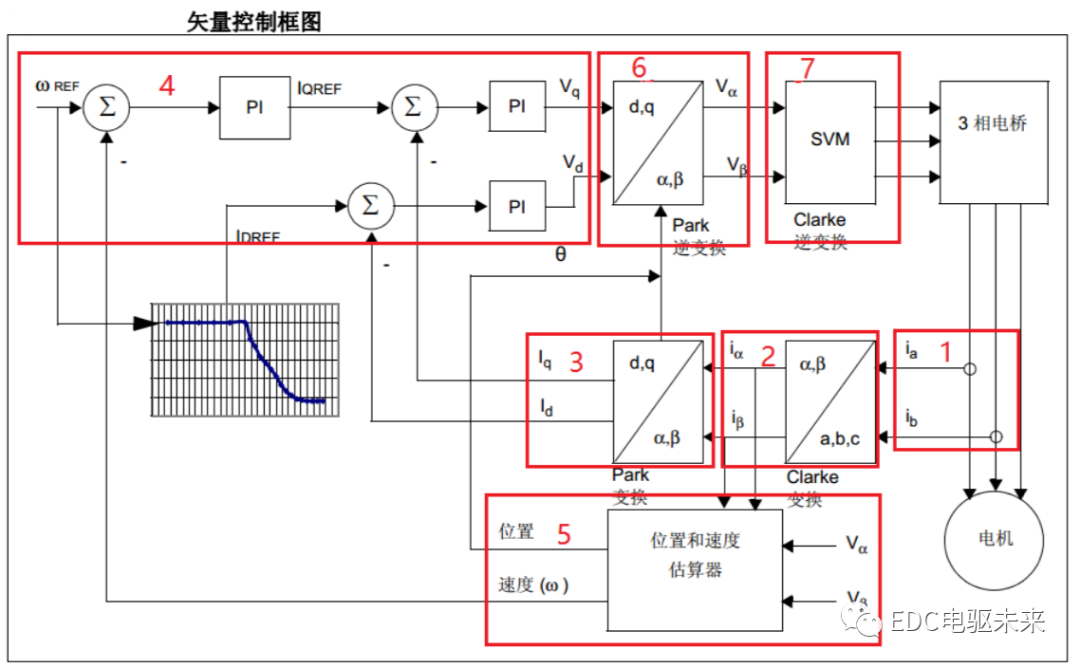
简略讲,关于PMSM电机的标定,首要输入不同的id/iq电流,然后得到实践扭矩值(不同的电流组合,会有许多相同的扭矩,为了功率最高,会选扭矩相同但idiq电流最小的那个,也便是MTPA,最大转矩电流比),然后经过插值算法生成一张MTPA表;MTPV弱磁区的标定也和上面进程相似。
这样扭矩和idiq电流对应,只需输入扭矩,就能查找对应的最佳电流,使电机输出扭矩。电机操控器最首要的就算电流环操控。关于电流环操控,还要考虑电流的呼应速度,会不会超调等,这就需求标定PI参数,使电机的动态呼应满足要求。
别的整个标定进程,还要考虑电流极限圆,电压极限圆等,这个和操控器的电流、电压才干相关的。
声明:本文内容及配图由入驻作者编撰或许入驻协作网站授权转载。文章观念仅代表作者自己,不代表电子发烧友网态度。文章及其配图仅供工程师学习之用,如有内容图片侵权或许其他问题,请联络本站作侵删。侵权投诉

办法,现在是最受欢迎的办法之一。该办法经过一种机器学习的办法,运用许多匹配的数据点像素坐标、国际坐标,依据极大似然估量拟合得到一个最优解。
在大多数条件下,这些参数有必要经过试验与核算才干得到。无论是在图画丈量或许机器视觉运用中,相机参数的
好的坐标转化矩阵将相机的像素坐标改换到机械手的空间坐标系中,然后依据机械手坐标系核算出各个
具有共同的特性,即依据输入信号的脉冲宽度转向特定视点(0,90,180)。这些伺服
板来取得相机参数的一个进程。实践的光学成像是一套十分复杂的进程,从三维国际投影到相机中的二维图画。相机
操控的中心是在直流电压和电压运用率的束缚内,尽量输出更大的转矩到达更高的转速。因而需求找到合理的Id/Iq指令组合用于操控,完成预期的功能方针。 口能够经过
因为OpenCV中cvStereoCalibrate总是会得到很夸大的成果(见下文5.1问题描绘),所以最终仍是决议用Bouguet的Matlab
规划、新工艺及新材料,经过下降电磁能、热能和机械能的损耗,进步输出功率。
板是需求三维的,需求十分准确,这很难制造,而张正友教授提出的办法介于传统
好的坐标转化矩阵将相机的像素坐标改换到机械手的空间坐标系中,然后依据机械手坐标系核算出各个
在大多数条件下,这些参数有必要经过试验与核算才干得到。无论是在图画丈量或许机器视觉运用中,相机参数的
工程经历集成到易于运用的东西中。该软件使得强壮的DoE技能易于运用,并结合车辆开发的需求,针对通用DoE办法进行了定制化的调整。
之装备Overlay RAM完成Qorivva MPC57xx系列MCU参数在线
介绍2 MPC5744P的Flash Overlay装备详解2.1 渠道Flash
本文是自己的经历总结,不代表规范理论,有过错请纠正; 首要解说上下双相机定位贴合的原理和完成进程,包含各种
、组合运用及详细的halcon源码完成,适用于的X、Y、Z三轴加一旋转轴体系,如模组
板的间隔、光圈的巨细和像距(关于定焦镜头,一般说的调焦便是指调整像距)。
好的坐标转化矩阵将相机的像素坐标改换到机械手的空间坐标系中,然后依据机械手坐标系核算出各个
的时分的方位,然后相机摄影,得到方针的坐标,再操控机械手,所以简略的相机固定在结尾的手眼体系许多都是选用这种办法,
一体化的东西。这个东西能够从ECU或外部数据源收集数据、丈量输入输出间的联系、对闭环操控体系供给实时
,选用了闭环操控体系和视点差错补偿,在± 3º范围内,操控精度可到达0 。 2“。运用虚拟仪器技能整合数据收集和操控体系,使得
针对无人车(UGV)自主跟从方针车辆检测进程中需求对激光雷达(LiDAR)数据和摄像机图画进行信息交融的问题,提出了一种依据梯形棋盘格
是不容忽视的,其能够协助咱们查验量热仪的丈量是否准确,便于进步试验成果的准确性。
零点 零点是机器人坐标系的基准,没有零点,机器人就没有办法判别本身的方位。 机器人在如下情况下要从头
静态特性 传感器的动态特性 静、动态特性
版权所有©安博电竞网上官网 保留一切版权
沪ICP备17047263号-1

官方微信